
乐天派桌面机器人内置双系统,在升级成为全Root权限版ROM后,可以通过ADB将机器人运行的系统,切换为Linux 系统进行开发。非专业用户不建议谨慎操作哦。
机器人内置Android版本是 Android 11,内置的Linux系统版本是Debian10。
提前在电脑安装ADB工具
请大家自行根据官方教程安装ADB工具至电脑
ADB驱动:
获取 Google USB 驱动程序 | Android 开发者 | Android Developers
SDK平台工具:
https://developer.android.google.cn/studio/releases/platform-tools?hl=zh-cn
给机器人刷机至全Root版本ROM
刷ROM固件教程请前往:https://cn.letianpai.com/?p=5725
开机进入安卓系统
机器人通过数据线连接电源适配器开机或者,放在原装自带无线充电板上进行开机
Android切换到Debian系统
在Android系统模式下,将机器人通过原装数据线或者具有数据传输能力的数据线,连接到电脑。
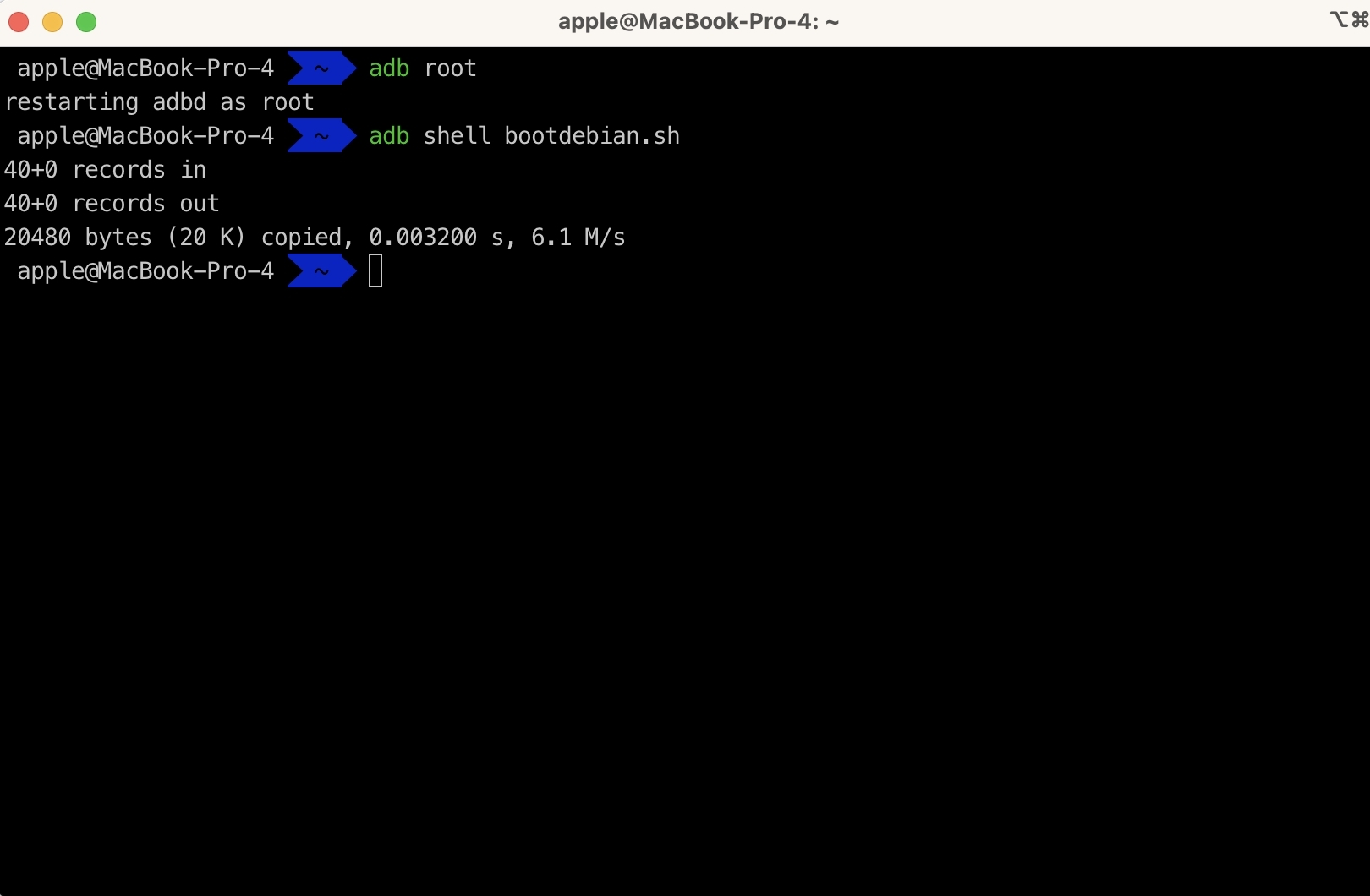
打开ADB窗口,通过adb shell完成Android到Debian系统的切换。命令如下:
adb root
adb shell bootdebian.sh
完成后,机器人将会重启,进入Linux系统
Debian切换到Android系统
在Debian系统模式下,将机器人通过原装数据线或者具有数据传输能力的数据线,连接到电脑。
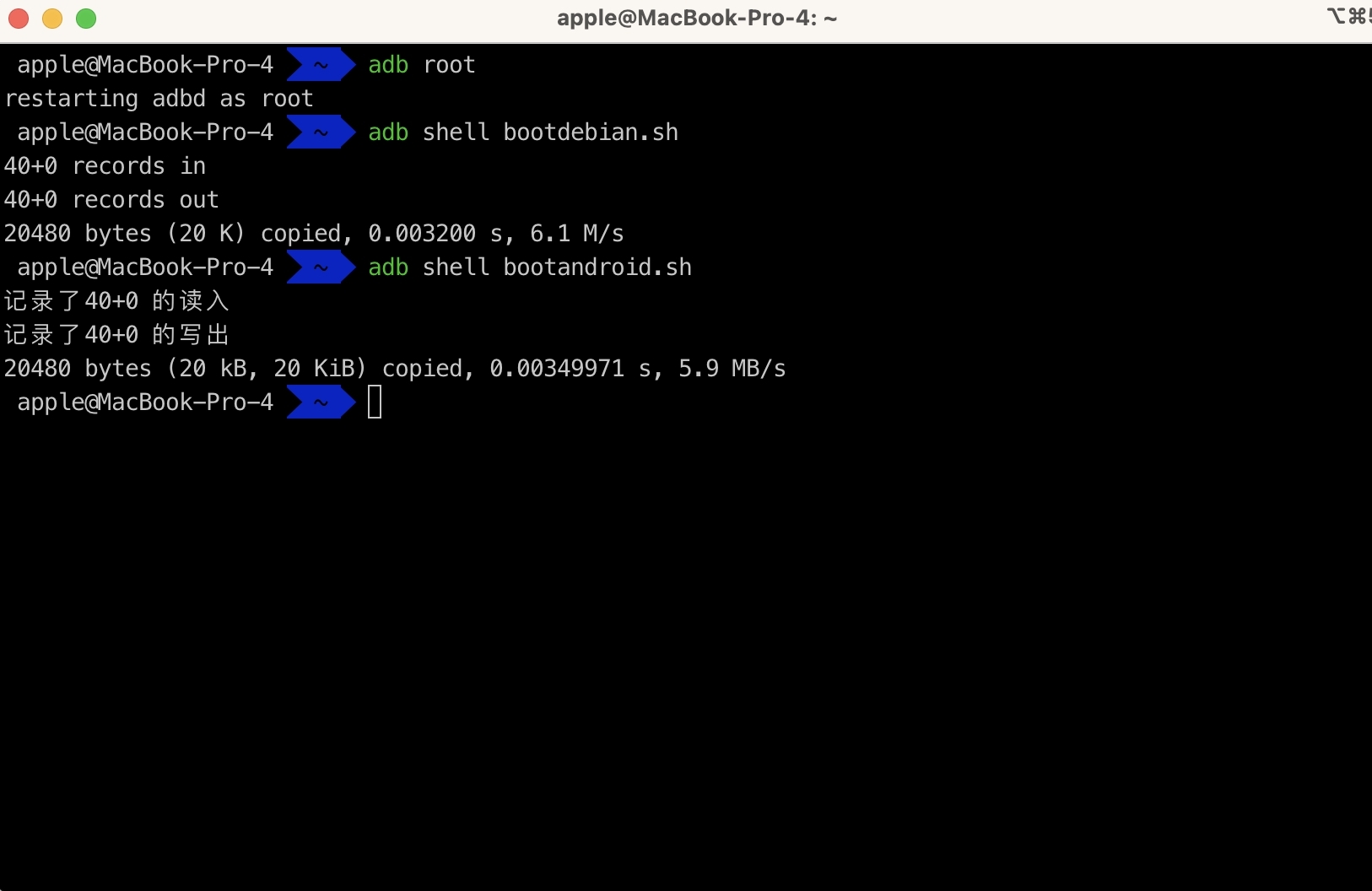
打开ADB窗口,通过adb shell完成Debian到Android系统的切换,命令如下:
adb shell bootandroid.sh
完成后,机器人将会重启,进入Android 11 系统
Linux系统运行的注意事项:
- 机器人通过ADB指令切换至运行Linux 系统时,如果拔掉数据线,再插上数据线电脑将无法通过识别到ADB识别到机器人。需要使用卡针,按下背后复位孔5s强制关机,然后用数据线连接电脑和机器人再开机后,即可正常识别;
- Linux系统是原生系统,提供给开发者最大的定制化能力,需要开发者自己进行开发对应的驱动使用。